아래 내용은 4xiDraw V1 / A4 / A3 / XL / XLX의 빠른 사용을 위한 설명입니다.

스텝. 1
먼저, 드로잉 머신 4xiDraw V1은 Plug in Play 방식으로 아답터의 전원 플러그를 DC Jack에 연결하면 동시에 동작대기 상태가 됩니다.
![]() 4xiDraw V1은 GRBL 프로토콜을 따릅니다.
4xiDraw V1은 GRBL 프로토콜을 따릅니다.
스텝. 2
사용할 GRBL Controller 프로그램을 다운로드 받습니다.
스텝. 3
GRBL용 Controller와의 연결방식은 블루투스를 이용하여 연결할 수 있습니다. 그러므로 블루투스가 가능한 PC나 노트북을 준비하셔야 합니다.
블루투스의 이름은 “4xiDraw-V1-XXXXXX”이며 암호는 “1234”로 페어링을 구성하시면 됩니다.
스텝. 4
블루투스의 연결 상황을 확인하여 설정된 직렬포트를 확인합니다.
Universal Gcode Sender 또는 LaserGRBL 등의 프로그램과 연결 시 블루투스와 페어링할 때 확인된 직렬포트를 선택하여 연결을 하시면 됩니다. 이때 Baudrate는 115200입니다.
스텝. 5
연결 후 초기 구동 시 Origin 설정을 위해 Command 라인에 $H를 입력하거나 Homing 버튼을 눌러 X축과 Y축 좌표를 0,0으로 만들어 주어야 합니다.
항상 드로잉 시작 시 Homing 설정을 하고 진행하는 것이 바람직합니다.
이제 드로잉 머신을 사용할 준비가 완료되었습니다.
Inkscape와 같은 드로잉 툴을 이용하여 그림이나 사진을 플러그인 툴을 사용하여 G-code로 변환 후 드로잉 머신의 GRBL Controller 프로그램에서 불러와 드로잉을 시작하면 됩니다.
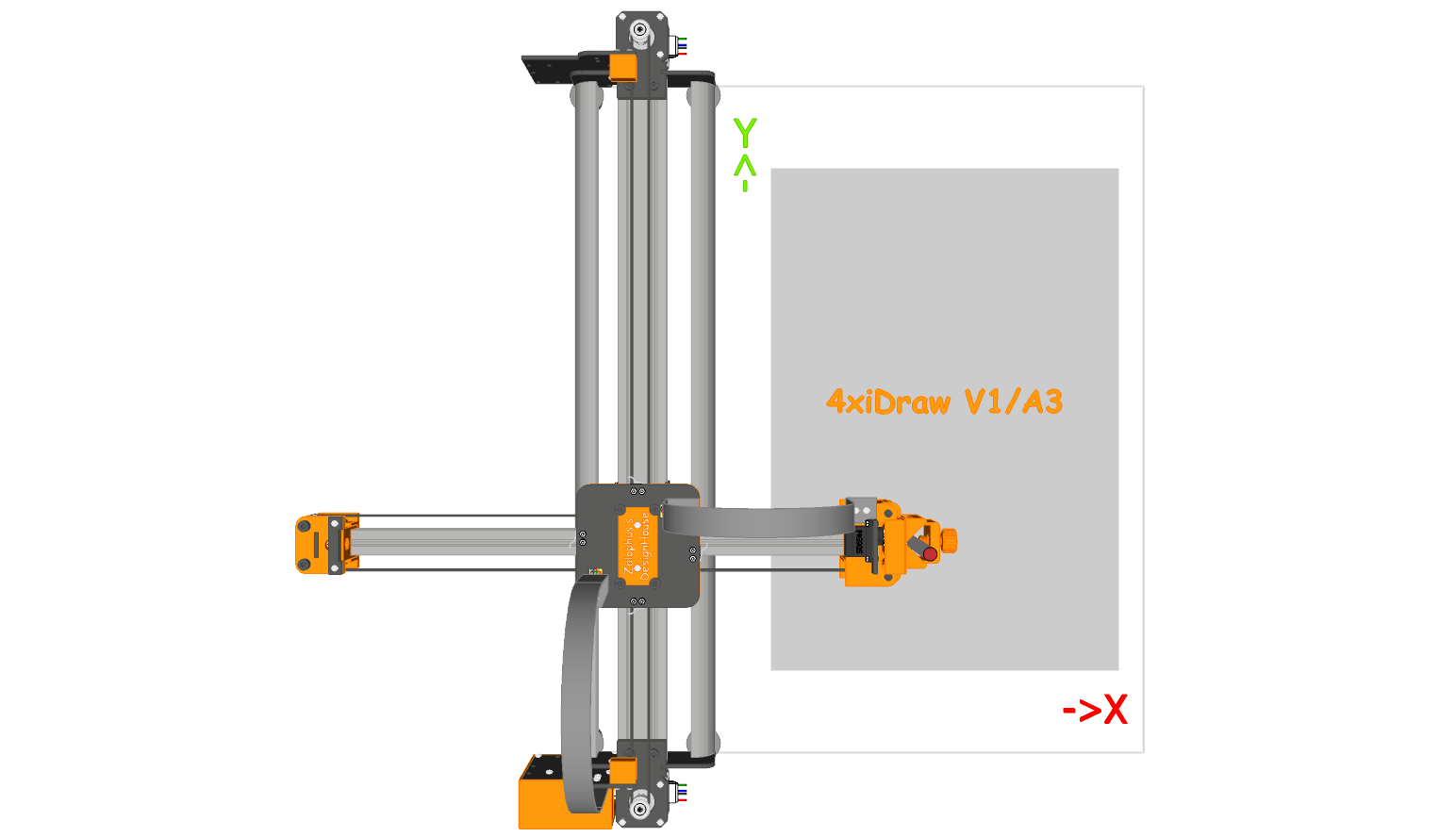
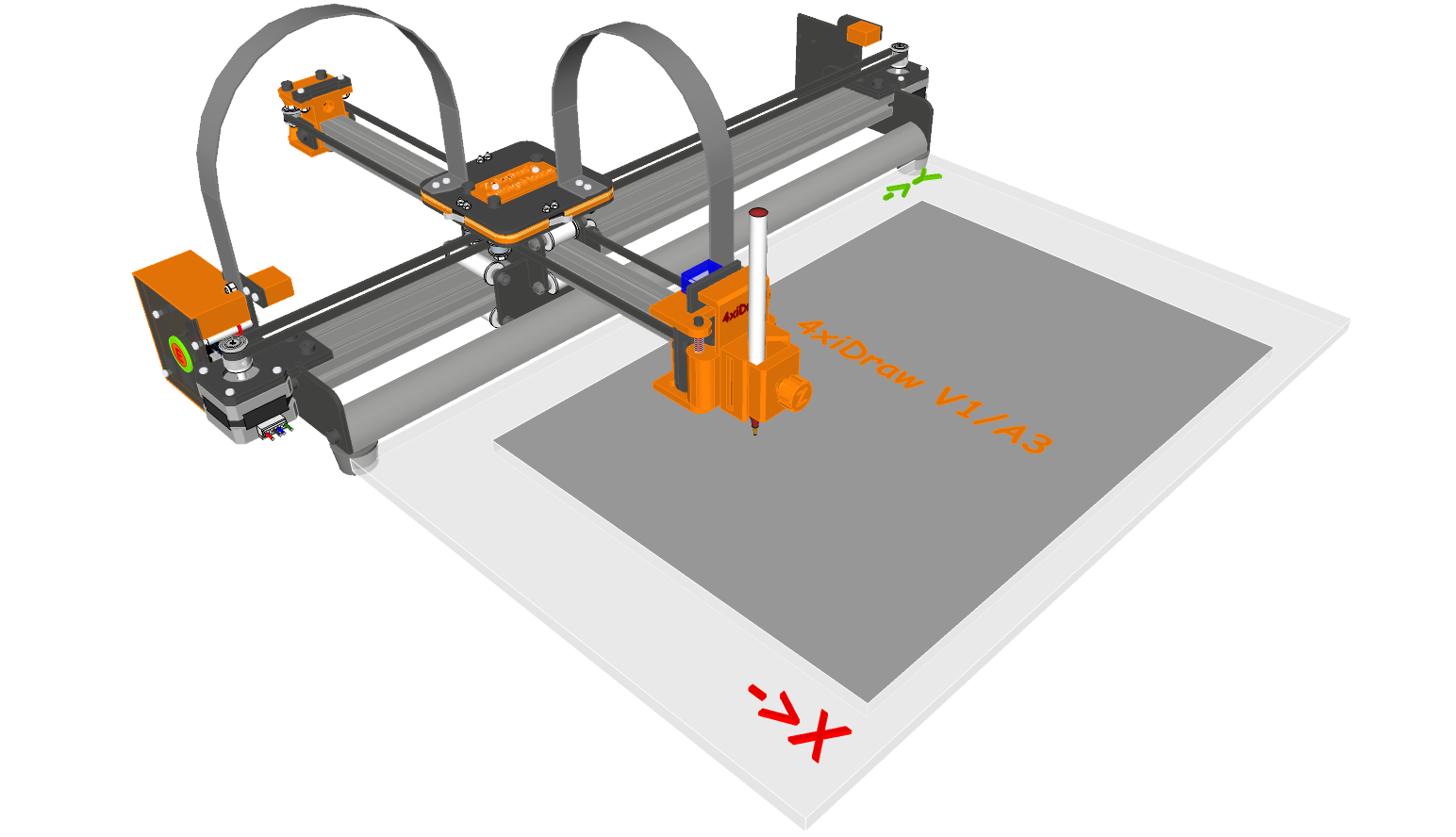
4xiDraw V1은 메인 프레임이 Y축이고 펜을 설치한 로드가 X축입니다.
드로잉 작업 시 펜을 설치한 X축 로드의 거리에 따라 높이가 다를 수 있으므로 가능하면 바닥이 평평한 곳에서 수평을 유지하는 것이 중요합니다.
드로잉 작업 시 이탈을 방지를 위해 드로잉 머신과 종이는 움직이지 않도록 고정하여 운영해 주시기 바랍니다.
아래는 Command 라인에 $$를 입력하면 확인 할 수 있는 GRBL 기본 설정값입니다.
$0=10 (Step pulse time)
$1=254 (Step idle delay) 스테퍼 모터를 비활성화하기 전에 정지 할 때 짧은 보류 지연을 설정합니다. 값이 255면 지연없이 모터를 계속 활성화합니다.
$2=0 (Step pulse invert)
$3=2 (Step direction invert) 제품마다 출고 시 설정 값이 다를 수 있습니다. 변경하지 마시기 바랍니다.
$4=0 (Invert step enable pin)
$5=0 (Invert limit pins)
$6=0 (Invert probe pin)
$10=2 (Status report options)
$11=0.010 (Junction deviation)
$12=0.002 (Arc tolerance)
$13=0 (Report in inches)
$20=1 (Soft limits enable) $130, $131에서 정의한 범위에 대한 제한을 갖습니다.
$21=1 (Hard limits enable)
$22=1 (Homing cycle enable)
$23=3 (Homing direction invert)
$24=25.000 (Homing locate feed rate)
$25=5000.000 (Homing search seek rate)
$26=250 (Homing switch debounce delay)
$27=2.000 (Homing switch pull-off distance) Homing 후 2mm 후퇴 위치를 Origin으로 설정합니다.
$30=180 (Maximum spindle speed) 서보의 각도를 0도에서 180 도까지 제어합니다.
$31=0 (Minimum spindle speed)
$32=0 (Laser-mode enable)
$100=80.000 (X-axis travel resolution)
$101=80.000 (Y-axis travel resolution)
$102=250.000 (Z-axis travel resolution) 4xiDraw V1에서는 사용하지 않습니다.
$110=15000.000 (X-axis maximum rate)
$111=15000.000 (Y-axis maximum rate)
$112=500.000 (Z-axis maximum rate) 4xiDraw V1에서는 사용하지 않습니다.
$120=500.000 (X-axis acceleration)
$121=500.000 (Y-axis acceleration)
$122=10.000 (Z-axis acceleration) 4xiDraw V1에서는 사용하지 않습니다.
$130=290.000 (X-axis maximum travel) A4: 230mm, A3: 290mm, XL: 230mm, XLX: 300mm
$131=430.000 (Y-axis maximum travel) A4: 300mm, A3: 430mm, XL: 600mm, XLX: 600mm
$132=20.000 (Z-axis maximum travel) 4xiDraw V1에서는 사용하지 않습니다.
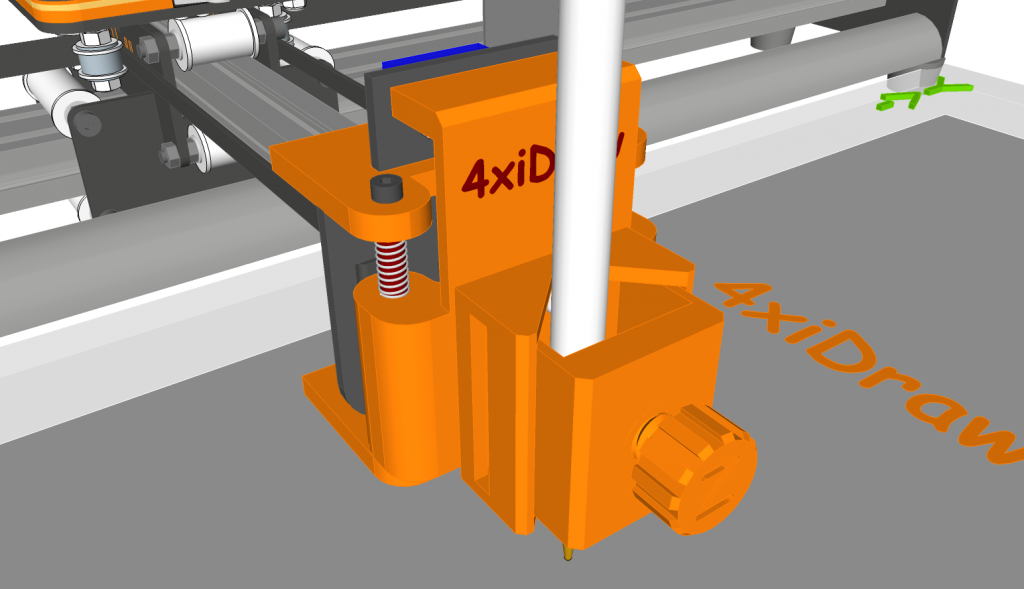
기본적으로 4xiDraw V1은 Z 축을 사용하지 않습니다. 대신 서보 모터를 사용하여 각도를 조절하여 높이를 조절 할 수 있습니다. (* 만약 Z축을 사용하고자 한다면 펜헤더를 교체하고 스텝모터 드라이버를 추가하여 연결해야 합니다.)

아래와 같은 명령어를 사용하여 서보혼의 각도를 조절하여 펜홀더의 높이를 내리거나 올릴 수 있습니다. G-Code 작성시 참고하시기 바랍니다.
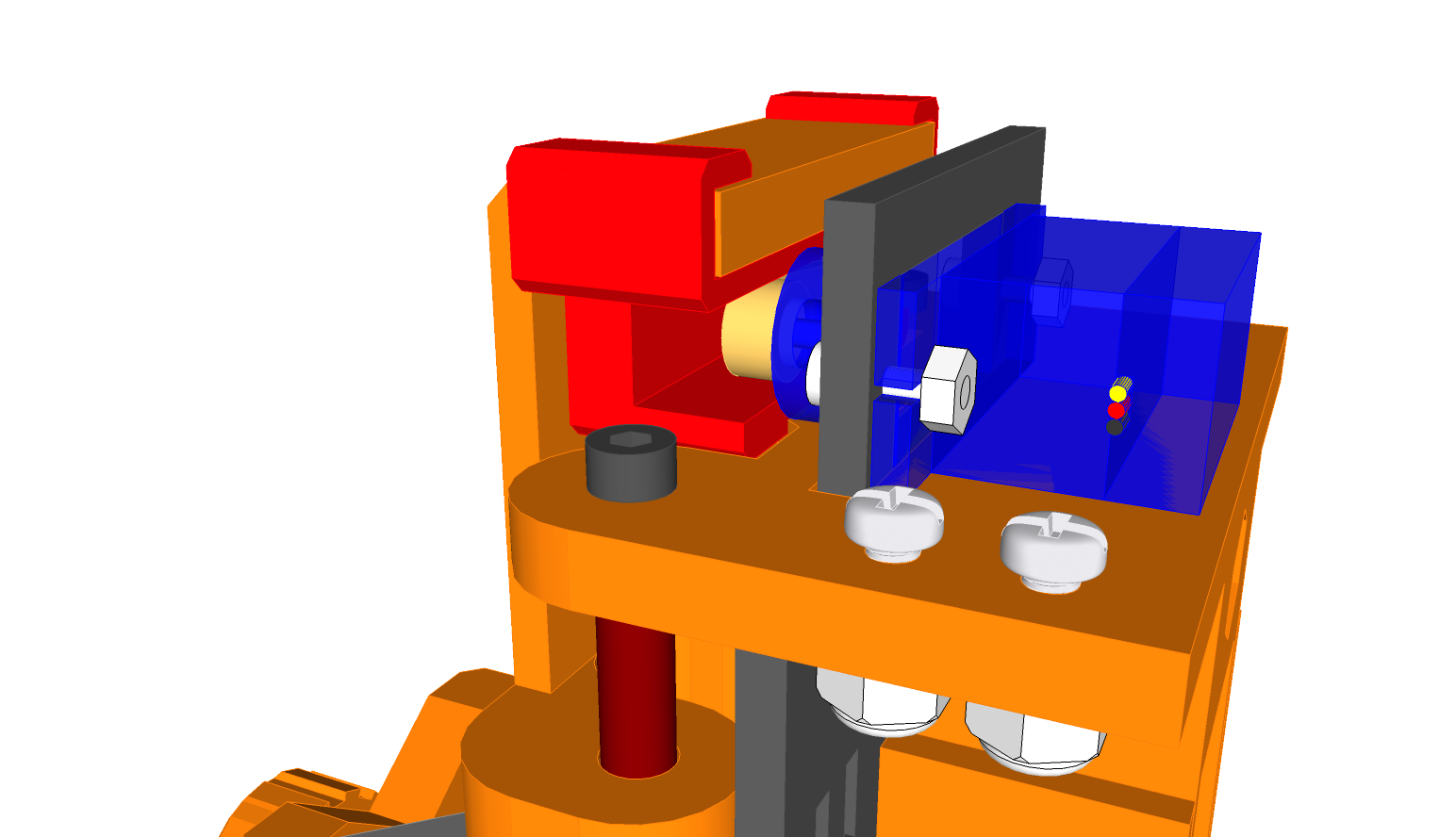
Pen Up/Down 서보 제어 명령어
Pen UpM3 S0 펜의 높이는 각도(S)를 변경하여 조절할 수 있습니다.
Pen DownM3 S90 펜은 기본적으로 스프링에 의해서 아래로 떨어지며 눌려지게 되어 있습니다.
4xiDraw V1의 전원공급는 DC 9V/2A(18W)를 기본으로 제공합니다.
하지만, 4xiDraw V1의 동작전원 범위는 ~12V 까지 사용이 가능합니다.
4xiDraw V1의 XY 동작속도는 ~15000mm/min로 주행이 가능하지만 통상 5000mm/min 또는 10000mm/min 이하를 권장합니다.
만약, 고속주행을 원하시거나 동작 중 멈춤현상이 자주 발생한다면 전원공급 장치를 DC 12V/3A 이상의 아답터나 전원공급장치(PSU)를 사용하실 것을 권장 드립니다.
참고 자료